2.1.2.1. Analysis of shells
Symbol |
Description |
SI units |
|---|---|---|
\(x^{'} , y^{'} , z^{'}\) |
Local shell coordinate directions |
\(m\) |
\(u^{'} , v^{'} , w^{'}\) |
Displacements of a generic point in the local coordinate system of the shell |
\(m\) |
\(u_o^{'} , v_o^{'} , w_o^{'}\) |
Displacements of a mid-plane point of the shell in the local coordinate system of the shell |
\(m\) |
\(\theta_{x^{'}} , \theta_{y^{'}}\) |
Rotations in the local coordinate system of the shell |
\(rad\) |
\(\epsilon_{x^{'}} , \epsilon_{y^{'}}\) |
In-plane shell axial strains |
– |
\(\gamma_{x^{'} y^{'}}\) |
In-plane shell shear strain |
– |
\(\gamma_{x^{'} z^{'}} , \gamma_{y^{'} z^{'}}\) |
Transverse shell shear strains |
– |
\(\sigma_{x^{'}} , \sigma_{y^{'}}\) |
In-plane shell axial stresses |
\(Pa\) |
\(\tau_{x^{'} y^{'}}\) |
In-plane shell shear stress |
\(Pa\) |
\(\tau_{x^{'} z^{'}} , \tau_{y^{'} z^{'}}\) |
Transverse shell shear stresses |
\(Pa\) |
\(\boldsymbol{D}_f^{'}\) |
Flexural constitutive matrix |
\(Pa\) |
\(\boldsymbol{D}_s^{'}\) |
Shear constitutive matrix |
\(Pa\) |
\(\alpha\) |
Shear correction factor |
– |
\(E_{x^{'}} , E_{y^{'}}\) |
Young modulus in the principal in-plane directions of the shell |
\(Pa\) |
\(G_{x^{'} y^{'}} , G_{y^{'} x^{'}}\) |
Shell’s in-plane shear modulus |
\(Pa\) |
\(\nu_{x^{'} y^{'}} , \nu_{y^{'} x^{'}}\) |
Shell’s in-plane Poisson coefficients |
– |
\(N_i\) |
Normal forces per unit length (membrane forces) |
\(N/m\) |
\(N_{ij}\) |
Horizontal shear forces per unit length (membrane forces) |
\(N/m\) |
\(M_i\) |
Bending moments per unit length |
\(N\) |
\(V_i\) |
Shear forces per unit length |
\(N/m\) |
\(M_{ij}\) |
Twisting moment per unit length |
\(N\) |
\(\hat{\boldsymbol{\sigma}}_{m}^{'}\) |
Generalized local membrane stresses of the shell |
\(N/m\) |
\(\hat{\boldsymbol{\sigma}}_{f}^{'}\) |
Generalized local flexural stresses of the shell |
\(N\) |
\(\hat{\boldsymbol{\sigma}}_{s}^{'}\) |
Shear generalized local stresses of the shell |
\(N/m\) |
The analysis of shells is based on approximating a real solid by its corresponding medium plane, assuming one of its dimensions is much smaller than the other two. Several additional assumptions and simplifications are also necessary to close the model. In particular, the Reissner-Mindlin hypothesis is adopted in RamSeries for the implementation of a structural model for shells. These hypotheses can be summarized as follows:
Small displacements
Linear elasticity of materials
Principle of loads superposition
Accounting for shear deformations
All the points belonging to a given normal to the medium plane have the same vertical displacement (in the \(z^{'}\) local shell’s direction)
All points that, before the deformation, belonged to a given normal to the medium plane, after deformation continue belonging to a straight line, no longer necessarily orthogonal to the deformed medium plane
Normal stress \(\boldsymbol{\sigma}_{z}\) is neglected
From the assumptions above it is possible to deduce the following expression for the shell’s deformation [Oñate_1995]:
where \(u_o^{'},v_o^{'},w_o^{'},\theta_{x^{'}},\theta_{y^{'}}\) are the five degrees of freedom to be considered for each node of the shell. The ‘ symbol that appears in all the degrees of freedom and coordinates that take part in the definition of the strain tensor in Eq. (2.1), indicates that they are referred to the local coordinates system of the shell.
The shell’s constitutive equation is given by:
where \(\boldsymbol{D}_f^{'}\) and \(\boldsymbol{D}_s^{'}\) are the flexural and shear constitutive matrices respectively. These constitutive matrices can be written, for an orthotropic material, as follows:
The factor \(\alpha\) in Eq. (2.4) is the coefficient to correct for the transversal tangential work (or shear correction factor).
In addition, due to the fact that for plates and shells the actual solid is approximated by the shell’s mid-plane, instead of solving for the 3-dimensional stress distribution through the entire body, the problem must be actually solved for certain stress resultants. These stress resultants are line distributions of force or moment per unit length along curves located in the middle plane of the plate or shell. These line distributions are statically equivalent to the distributions of stress on certain planes of the 3-dimensional body [Malvern_1969] (see Fig. 2.1 and Fig. 2.2).
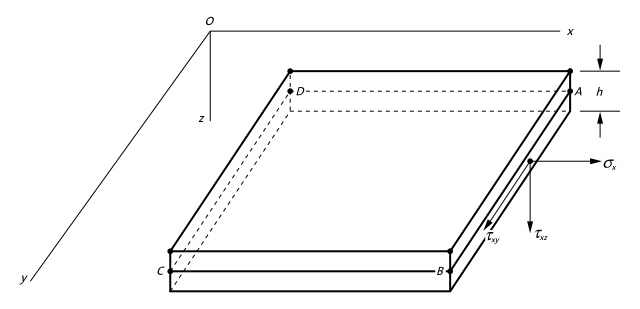
Fig. 2.1 Schematic representation of a plate or shell element of thickness h. Within the context of a shell theory, the actual solid is approximated by its mid-plane (ABCD), and the stresses distributions (\(\sigma_x, \tau_{xy}, \tau_{xz}\)) are replaced by stress resultants along curves in the middle plane (AB for instance in the figure).
In this sense, the shell theory replaces the distributed normal stress \(\sigma_x\) per unit area on the positive x-face of the element by a normal force N_x per unit length along AB, and a bending moment \(M_x\) per unit length along AB that can be expressed as:
These line distributions of force and moment are statically equivalent to the surface distribution \(\sigma_x\). Similarly, the distribution of vertical shear stress \(τ_{xz}\) is statically equivalent to a vertical shear force \(V_x\) per unit length along AB in the form:
And finally, the horizontal shear forces resulting from the shear stress distribution \(\tau_{xz}\) are represented by a twisting moment per unit length of the form:
Finally, the horizontal shear forces per unit length \(N_{xy}\) and \(N_{yx}\) are defined as:
Forces \(N_y\) and \(V_y\) and bending moments \(M_y\) per unit length are defined by replacing \(x\) by \(y\) in the equations above. Fig. 2.2 summarizes the positive sign convention for the stress resultants.
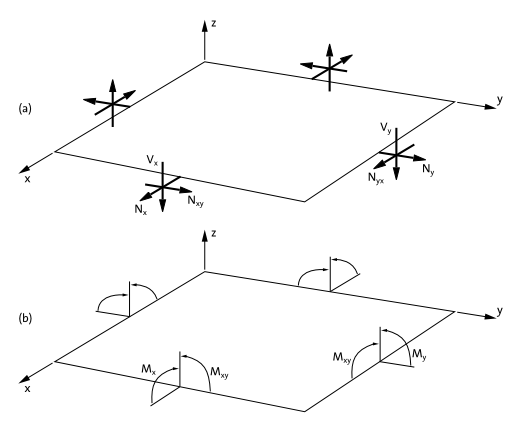
Fig. 2.2 Sign convention for stress resultants. (a) Positive forces. (b) Positive moments.
The forces per unit length (\(N_x\), \(N_y\) and \(N_{xy}\)) acting in the plane of the shell are called membrane forces.
Thus, summarizing, it is possible to define the strengths on the shell as follows:
where \(h\) is the thickness of the shell and \(\hat{\sigma}_m^{'}\), \(\hat{\sigma}_f^{'}\), and \(\hat{\sigma}_s^{'}\) are the membrane, flexural and shear generalized local stresses respectively. The relation between the generalized stresses and the generalized local deformations can be finally obtained from Eqs. (2.2) and (2.10).
being \(\hat{\boldsymbol{D}}^{'}\) the shell constitutive matrix.
2.1.2.1.1. Stiffened shells model
RamSeries allows to simulate shell structures reinforced with beam elements using a simpler approach consisting on using an equivalent reinforced shell model. The equivalence is achieved by enforcing the equivalent shell to have the same weight, flexural rigidity (i.e. inertia) and membrane stiffness (area) than the original shells/beams structure.
In order to ensure that the equivalent shell has the same weight than the shell-beams system the following relation must be fulfilled:
where \(sh\) , \(st\) and \(eq\) subscripts refer to the shell, stiffener and equivalent shell quantities respectively.
Following the Reissner-Mindlin formulation in (2.3) and (2.4) and assuming an isotropic material, the flexural and shear stiffness matrices of the equivalent shell can be written as follows:
And the stiffness matrix of the system is given by:
where:
with \(\alpha = 5/6\) and \(\boldsymbol{D}_{mf} = 0\) for simplicity.
2.1.2.1.1.1. Shear Locking Phenomenon
Shear locking is a well-known numerical issue in finite element analysis (FEA) of thin plates and shells. It originates from the mathematical formulation of certain element types—especially low-order elements—and manifests as an artificially increased shear stiffness.
2.1.2.1.1.1.1. Origin and Description
Most shell elements in commercial FEA software (quadrilateral or DKT types) are based on the Mindlin–Reissner plate theory, which accounts for transverse shear deformation. While this formulation performs well for moderately thick shells, it becomes problematic for thin structures, where transverse shear deformation is nearly zero.
In such cases, low-order elements are unable to represent the near-zero shear state correctly, leading to parasitic shear rigidity and the so-called shear locking effect.
This effect results in:
Underestimated displacements, due to excessive stiffness.
Distorted stress and moment distributions, arising from a strain field contaminated by spurious shear effects.
2.1.2.1.1.1.2. Influence of Element Type
The severity of shear locking depends on the element formulation:
- Quadrilateral Elements (Linear and Quadratic)
Linear quadrilateral elements with full integration are highly susceptible to shear locking. Although second-order quadrilaterals (8 nodes) improve performance, they do not eliminate the shear locking phenomenon completely, especially with coarse meshes or deformed elements. A common technique to mitigate this is to use reduced integration, but it can introduce other problems such as zero energy modes (hourglassing).
- DKT Elements (Discrete Kirchhoff Theory)
The DKT formulation is an attempt to “force” a 3-node element to comply with the kinematics of Kirchhoff’s theory (which does not consider shear deformation) in a discrete manner. It is a good formulation for pure bending, but in complex geometry such as a U-beam, where there is strong interaction between the bending of the flanges and the bending/membrane of the web, it may still exhibit problems similar to locking in those transition zones.
- Triangular Elements with Drilling Rotations
The addition of a rotational degree of freedom about the normal (drilling rotation) significantly enhances membrane behavior and reduces locking. These elements are particularly effective in stiffened shell models, where flange–web interaction produces coupled bending and membrane stresses.
2.1.2.1.1.1.3. Implications for the Displacement result
Although displacement fields often appear smooth and physically consistent, the derived quantities (stresses, moments, shear forces) may still be inaccurate if shear locking is present. This is due to the amplification of numerical errors during differentiation of the displacement field.
2.1.2.1.1.1.4. Recommendations
For thin or stiffened shell structures prefer triangular elements with drilling rotations to minimize shear locking. This approach is widely adopted in industrial finite element formulations and ensure accurate representation of both bending and membrane effects in stiffened shells.