In this section, a summary of the theory of 3D solids analysis is provided. The basic assumptions under the formulation implemented within RamSeries are as follows:
Small displacements
Linear elasticity of materials
The principle of loads superposition
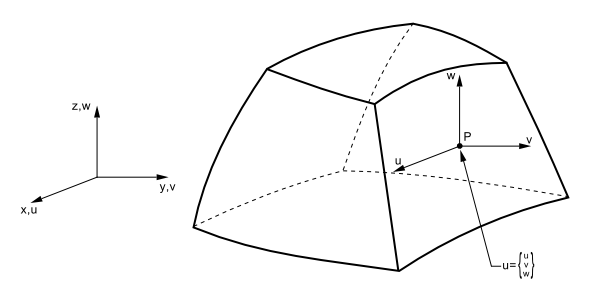
For a 3D solid, the displacement of a given point is completely determined by the values of the three degrees of freedom \(u, v, w\).
Fig. 2.3 Schematic representation of a 3D solid. The deformation of the solid is completely determined once the displacement field \((u,v,w)\) is known. Hence, three degrees of freedom must be considered for each material point.
Following the three-dimensional theory of elasticity, the deformation of the solid is defined, using the Voigt notation, as follows:
In the most general case of anisotropic elasticity, the stress-strain relation is provided through a symmetric 6x6 constitutive matrix with 21 independent coefficients. Nevertheless, the more simple and commonly used orthotropic case is considered in RamSeries. Hence, considering \(x^{'},y^{'},z^{'}\) the principal orthotropic directions of the solid material, the constitutive equation in local axes can be written as:
In the isotropic case only two material parameters, the Young’s modulus E and the Poisson coefficient ν, are required and the constitutive relation reduces to: